5 几何(by WIDA)
5.1 库实数类实现(双精度)
using Real = int;
using Point = complex<Real>;
Real cross(const Point &a, const Point &b) {
return (conj(a) * b).imag();
}
Real dot(const Point &a, const Point &b) {
return (conj(a) * b).real();
}
5.2 平面几何必要初始化
5.2.1 字符串读入浮点数
const int Knum = 4;
int read(int k = Knum) {
string s;
cin >> s;
int num = 0;
int it = s.find('.');
if (it != -1) { // 存在小数点
num = s.size() - it - 1; // 计算小数位数
s.erase(s.begin() + it); // 删除小数点
}
for (int i = 1; i <= k - num; i++) { // 补全小数位数
s += '0';
}
return stoi(s);
}
5.2.2 预置函数
using ld = long double;
const ld PI = acos(-1);
const ld EPS = 1e-7;
const ld INF = numeric_limits<ld>::max();
#define cc(x) cout << fixed << setprecision(x);
ld fgcd(ld x, ld y) { // 实数域gcd
return abs(y) < EPS ? abs(x) : fgcd(y, fmod(x, y));
}
template<class T, class S> bool equal(T x, S y) {
return -EPS < x - y && x - y < EPS;
}
template<class T> int sign(T x) {
if (-EPS < x && x < EPS) return 0;
return x < 0 ? -1 : 1;
}
5.2.3 点线封装
template<class T> struct Point { // 在C++17下使用 emplace_back 绑定可能会导致CE!
T x, y;
Point(T x_ = 0, T y_ = 0) : x(x_), y(y_) {} // 初始化
template<class U> operator Point<U>() { // 自动类型匹配
return Point<U>(U(x), U(y));
}
Point &operator+=(Point p) & { return x += p.x, y += p.y, *this; }
Point &operator+=(T t) & { return x += t, y += t, *this; }
Point &operator-=(Point p) & { return x -= p.x, y -= p.y, *this; }
Point &operator-=(T t) & { return x -= t, y -= t, *this; }
Point &operator*=(T t) & { return x *= t, y *= t, *this; }
Point &operator/=(T t) & { return x /= t, y /= t, *this; }
Point operator-() const { return Point(-x, -y); }
friend Point operator+(Point a, Point b) { return a += b; }
friend Point operator+(Point a, T b) { return a += b; }
friend Point operator-(Point a, Point b) { return a -= b; }
friend Point operator-(Point a, T b) { return a -= b; }
friend Point operator*(Point a, T b) { return a *= b; }
friend Point operator*(T a, Point b) { return b *= a; }
friend Point operator/(Point a, T b) { return a /= b; }
friend bool operator<(Point a, Point b) {
return equal(a.x, b.x) ? a.y < b.y - EPS : a.x < b.x - EPS;
}
friend bool operator>(Point a, Point b) { return b < a; }
friend bool operator==(Point a, Point b) { return !(a < b) && !(b < a); }
friend bool operator!=(Point a, Point b) { return a < b || b < a; }
friend auto &operator>>(istream &is, Point &p) {
return is >> p.x >> p.y;
}
friend auto &operator<<(ostream &os, Point p) {
return os << "(" << p.x << ", " << p.y << ")";
}
};
template<class T> struct Line {
Point<T> a, b;
Line(Point<T> a_ = Point<T>(), Point<T> b_ = Point<T>()) : a(a_), b(b_) {}
template<class U> operator Line<U>() { // 自动类型匹配
return Line<U>(Point<U>(a), Point<U>(b));
}
friend auto &operator<<(ostream &os, Line l) {
return os << "<" << l.a << ", " << l.b << ">";
}
};
5.2.4 叉乘
定义公式 \(a\times b=|a||b|\sin \theta\)。
template<class T> T cross(Point<T> a, Point<T> b) { // 叉乘
return a.x * b.y - a.y * b.x;
}
template<class T> T cross(Point<T> p1, Point<T> p2, Point<T> p0) { // 叉乘 (p1 - p0) x (p2 - p0);
return cross(p1 - p0, p2 - p0);
}
5.2.5 点乘
定义公式 \(a\times b=|a||b|\cos \theta\)。
template<class T> T dot(Point<T> a, Point<T> b) { // 点乘
return a.x * b.x + a.y * b.y;
}
template<class T> T dot(Point<T> p1, Point<T> p2, Point<T> p0) { // 点乘 (p1 - p0) * (p2 - p0);
return dot(p1 - p0, p2 - p0);
}
5.2.6 欧几里得距离公式
最常用的距离公式。需要注意,开根号会丢失精度,如无强制要求,先不要开根号,留到最后一步一起开。
template <class T> ld dis(T x1, T y1, T x2, T y2) {
ld val = (x1 - x2) * (x1 - x2) + (y1 - y2) * (y1 - y2);
return sqrt(val);
}
template <class T> ld dis(Point<T> a, Point<T> b) {
return dis(a.x, a.y, b.x, b.y);
}
5.2.7 曼哈顿距离公式
template <class T> T dis1(Point<T> p1, Point<T> p2) { // 曼哈顿距离公式
return abs(p1.x - p2.x) + abs(p1.y - p2.y);
}
5.2.8 将向量转换为单位向量
Point<ld> standardize(Point<ld> vec) { // 转换为单位向量
return vec / sqrt(vec.x * vec.x + vec.y * vec.y);
}
5.2.9 向量旋转
将当前向量移动至原点后顺时针旋转 \(90^{\circ}\) ,即获取垂直于当前向量的、起点为原点的向量。在计算垂线时非常有用。例如,要想获取点 \(a\) 绕点 \(o\) 顺时针旋转 \(90^{\circ}\) 后的点,可以这样书写代码:auto ans = o + rotate(o, a); ;如果是逆时针旋转,那么只需更改符号即可:auto ans = o - rotate(o, a); 。
template<class T> Point<T> rotate(Point<T> p1, Point<T> p2) { // 旋转
Point<T> vec = p1 - p2;
return {-vec.y, vec.x};
}
5.3 平面角度与弧度
5.3.1 弧度角度相互转换
ld toDeg(ld x) { // 弧度转角度
return x * 180 / PI;
}
ld toArc(ld x) { // 角度转弧度
return PI / 180 * x;
}
5.3.2 正弦定理
\(\dfrac{a}{\sin A}=\dfrac{b}{\sin B}=\dfrac{c}{\sin C}=2R\) ,其中 \(R\) 为三角形外接圆半径;
5.3.3 余弦定理(已知三角形三边,求角)
\(\cos C=\dfrac{a^2+b^2-c^2}{2ab},\cos B=\dfrac{a^2+c^2-b^2}{2ac},\cos A=\dfrac{b^2+c^2-a^2}{2bc}\)。可以借此推导出三角形面积公式 \(S_{\triangle ABC}=\dfrac{ab\cdot\sin C}{2}=\dfrac{bc\cdot\sin A}{2}=\dfrac{ac\cdot\sin B}{2}\)。
注意,计算格式是:由 \(b,c,a\) 三边求 \(\angle A\);由 \(a, c, b\) 三边求 \(\angle B\);由 \(a, b, c\) 三边求 \(\angle C\)。
ld angle(ld a, ld b, ld c) { // 余弦定理
ld val = acos((a * a + b * b - c * c) / (2.0 * a * b)); // 计算弧度
return val;
}
5.3.4 求两向量的夹角
能够计算 \([0^{\circ},180^{\circ}]\) 区间的角度。
ld angle(Point<ld> a, Point<ld> b) {
ld val = abs(cross(a, b));
return abs(atan2(val, a.x * b.x + a.y * b.y));
}
5.3.5 向量旋转任意角度
逆时针旋转,转换公式:\(\left\{\begin{matrix} x'=x\cos \theta-y\sin \theta \\ y'=x\sin \theta+y\cos \theta \end{matrix}\right.\)
Point<ld> rotate(Point<ld> p, ld rad) {
return {p.x * cos(rad) - p.y * sin(rad), p.x * sin(rad) + p.y * cos(rad)};
}
5.3.6 点绕点旋转任意角度
逆时针旋转,转换公式:\(\left\{\begin{matrix} x'=(x_0-x_1)\cos\theta+(y_0-y_1)\sin\theta+x_1 \\ y'=(x_1-x_0)\sin\theta+(y_0-y_1)\cos\theta+y_1 \end{matrix}\right.\)
Point<ld> rotate(Point<ld> a, Point<ld> b, ld rad) {
ld x = (a.x - b.x) * cos(rad) + (a.y - b.y) * sin(rad) + b.x;
ld y = (b.x - a.x) * sin(rad) + (a.y - b.y) * cos(rad) + b.y;
return {x, y};
}
5.4 平面点线相关
5.4.1 点是否在直线上(三点是否共线)
template<class T> bool onLine(Point<T> a, Point<T> b, Point<T> c) {
return sign(cross(b, a, c)) == 0;
}
template<class T> bool onLine(Point<T> p, Line<T> l) {
return onLine(p, l.a, l.b);
}
5.4.2 点是否在向量(直线)左侧
需要注意,向量的方向会影响答案;点在向量上时不视为在左侧。
template<class T> bool pointOnLineLeft(Pt p, Lt l) {
return cross(l.b, p, l.a) > 0;
}
5.4.3 两点是否在直线同侧/异侧
template<class T> bool pointOnLineSide(Pt p1, Pt p2, Lt vec) {
T val = cross(p1, vec.a, vec.b) * cross(p2, vec.a, vec.b);
return sign(val) == 1;
}
template<class T> bool pointNotOnLineSide(Pt p1, Pt p2, Lt vec) {
T val = cross(p1, vec.a, vec.b) * cross(p2, vec.a, vec.b);
return sign(val) == -1;
}
5.4.4 两直线相交交点
在使用前需要先判断直线是否平行。
Pd lineIntersection(Ld l1, Ld l2) {
ld val = cross(l2.b - l2.a, l1.a - l2.a) / cross(l2.b - l2.a, l1.a - l1.b);
return l1.a + (l1.b - l1.a) * val;
}
5.4.5 两直线是否平行/垂直/相同
template<class T> bool lineParallel(Lt p1, Lt p2) {
return sign(cross(p1.a - p1.b, p2.a - p2.b)) == 0;
}
template<class T> bool lineVertical(Lt p1, Lt p2) {
return sign(dot(p1.a - p1.b, p2.a - p2.b)) == 0;
}
template<class T> bool same(Line<T> l1, Line<T> l2) {
return lineParallel(Line{l1.a, l2.b}, {l1.b, l2.a}) &&
lineParallel(Line{l1.a, l2.a}, {l1.b, l2.b}) && lineParallel(l1, l2);
}
5.4.6 点到直线的最近距离与最近点
pair<Pd, ld> pointToLine(Pd p, Ld l) {
Pd ans = lineIntersection({p, p + rotate(l.a, l.b)}, l);
return {ans, dis(p, ans)};
}
如果只需要计算最近距离,下方的写法可以减少书写的代码量,效果一致。
template<class T> ld disPointToLine(Pt p, Lt l) {
ld ans = cross(p, l.a, l.b);
return abs(ans) / dis(l.a, l.b); // 面积除以底边长
}
5.4.7 点是否在线段上
template<class T> bool pointOnSegment(Pt p, Lt l) { // 端点也算作在直线上
return sign(cross(p, l.a, l.b)) == 0 && min(l.a.x, l.b.x) <= p.x && p.x <= max(l.a.x, l.b.x) &&
min(l.a.y, l.b.y) <= p.y && p.y <= max(l.a.y, l.b.y);
}
template<class T> bool pointOnSegment(Pt p, Lt l) { // 端点不算
return pointOnSegment(p, l) && min(l.a.x, l.b.x) < p.x && p.x < max(l.a.x, l.b.x) &&
min(l.a.y, l.b.y) < p.y && p.y < max(l.a.y, l.b.y);
}
5.4.8 点到线段的最近距离与最近点
pair<Pd, ld> pointToSegment(Pd p, Ld l) {
if (sign(dot(p, l.b, l.a)) == -1) { // 特判到两端点的距离
return {l.a, dis(p, l.a)};
} else if (sign(dot(p, l.a, l.b)) == -1) {
return {l.b, dis(p, l.b)};
}
return pointToLine(p, l);
}
5.4.9 点在直线上的投影点(垂足)
Pd project(Pd p, Ld l) { // 投影
Pd vec = l.b - l.a;
ld r = dot(vec, p - l.a) / (vec.x * vec.x + vec.y * vec.y);
return l.a + vec * r;
}
5.4.10 线段的中垂线
template<class T> Lt midSegment(Lt l) {
Pt mid = (l.a + l.b) / 2; // 线段中点
return {mid, mid + rotate(l.a, l.b)};
}
5.4.11 两线段是否相交及交点
该扩展版可以同时返回相交状态和交点,分为四种情况:\(0\) 代表不相交;\(1\) 代表普通相交;\(2\) 代表重叠(交于两个点);\(3\) 代表相交于端点。需要注意,部分运算可能会使用到直线求交点,此时务必保证变量类型为浮点数!
template<class T> tuple<int, Pt, Pt> segmentIntersection(Lt l1, Lt l2) {
auto [s1, e1] = l1;
auto [s2, e2] = l2;
auto A = max(s1.x, e1.x), AA = min(s1.x, e1.x);
auto B = max(s1.y, e1.y), BB = min(s1.y, e1.y);
auto C = max(s2.x, e2.x), CC = min(s2.x, e2.x);
auto D = max(s2.y, e2.y), DD = min(s2.y, e2.y);
if (A < CC || C < AA || B < DD || D < BB) {
return {0, {}, {}};
}
if (sign(cross(e1 - s1, e2 - s2)) == 0) {
if (sign(cross(s2, e1, s1)) != 0) {
return {0, {}, {}};
}
Pt p1(max(AA, CC), max(BB, DD));
Pt p2(min(A, C), min(B, D));
if (!pointOnSegment(p1, l1)) {
swap(p1.y, p2.y);
}
if (p1 == p2) {
return {3, p1, p2};
} else {
return {2, p1, p2};
}
}
auto cp1 = cross(s2 - s1, e2 - s1);
auto cp2 = cross(s2 - e1, e2 - e1);
auto cp3 = cross(s1 - s2, e1 - s2);
auto cp4 = cross(s1 - e2, e1 - e2);
if (sign(cp1 * cp2) == 1 || sign(cp3 * cp4) == 1) {
return {0, {}, {}};
}
// 使用下方函数时请使用浮点数
Pd p = lineIntersection(l1, l2);
if (sign(cp1) != 0 && sign(cp2) != 0 && sign(cp3) != 0 && sign(cp4) != 0) {
return {1, p, p};
} else {
return {3, p, p};
}
}
如果不需要求交点,那么使用快速排斥+跨立实验即可,其中重叠、相交于端点均视为相交。
template<class T> bool segmentIntersection(Lt l1, Lt l2) {
auto [s1, e1] = l1;
auto [s2, e2] = l2;
auto A = max(s1.x, e1.x), AA = min(s1.x, e1.x);
auto B = max(s1.y, e1.y), BB = min(s1.y, e1.y);
auto C = max(s2.x, e2.x), CC = min(s2.x, e2.x);
auto D = max(s2.y, e2.y), DD = min(s2.y, e2.y);
return A >= CC && B >= DD && C >= AA && D >= BB &&
sign(cross(s1, s2, e1) * cross(s1, e1, e2)) == 1 &&
sign(cross(s2, s1, e2) * cross(s2, e2, e1)) == 1;
}
5.5 平面圆相关(浮点数处理)
5.5.1 点到圆的最近点
同时返回最近点与最近距离。需要注意,当点为圆心时,这样的点有无数个,此时我们视作输入错误,直接返回圆心。
pair<Pd, ld> pointToCircle(Pd p, Pd o, ld r) {
Pd U = o, V = o;
ld d = dis(p, o);
if (sign(d) == 0) { // p 为圆心时返回圆心本身
return {o, 0};
}
ld val1 = r * abs(o.x - p.x) / d;
ld val2 = r * abs(o.y - p.y) / d * ((o.x - p.x) * (o.y - p.y) < 0 ? -1 : 1);
U.x += val1, U.y += val2;
V.x -= val1, V.y -= val2;
if (dis(U, p) < dis(V, p)) {
return {U, dis(U, p)};
} else {
return {V, dis(V, p)};
}
}
5.5.2 根据圆心角获取圆上某点
将圆上最右侧的点以圆心为旋转中心,逆时针旋转 rad 度。
Point<ld> getPoint(Point<ld> p, ld r, ld rad) {
return {p.x + cos(rad) * r, p.y + sin(rad) * r};
}
5.5.3 直线是否与圆相交及交点
\(0\) 代表不相交;\(1\) 代表相切;\(2\) 代表相交。
tuple<int, Pd, Pd> lineCircleCross(Ld l, Pd o, ld r) {
Pd P = project(o, l);
ld d = dis(P, o), tmp = r * r - d * d;
if (sign(tmp) == -1) {
return {0, {}, {}};
} else if (sign(tmp) == 0) {
return {1, P, {}};
}
Pd vec = standardize(l.b - l.a) * sqrt(tmp);
return {2, P + vec, P - vec};
}
5.5.4 线段是否与圆相交及交点
\(0\) 代表不相交;\(1\) 代表相切;\(2\) 代表相交于一个点;\(3\) 代表相交于两个点。
tuple<int, Pd, Pd> segmentCircleCross(Ld l, Pd o, ld r) {
auto [type, U, V] = lineCircleCross(l, o, r);
bool f1 = pointOnSegment(U, l), f2 = pointOnSegment(V, l);
if (type == 1 && f1) {
return {1, U, {}};
} else if (type == 2 && f1 && f2) {
return {3, U, V};
} else if (type == 2 && f1) {
return {2, U, {}};
} else if (type == 2 && f2) {
return {2, V, {}};
} else {
return {0, {}, {}};
}
}
5.5.5 两圆是否相交及交点
\(0\) 代表内含;\(1\) 代表相离;\(2\) 代表相切;\(3\) 代表相交。
tuple<int, Pd, Pd> circleIntersection(Pd p1, ld r1, Pd p2, ld r2) {
ld x1 = p1.x, x2 = p2.x, y1 = p1.y, y2 = p2.y, d = dis(p1, p2);
if (sign(abs(r1 - r2) - d) == 1) {
return {0, {}, {}};
} else if (sign(r1 + r2 - d) == -1) {
return {1, {}, {}};
}
ld a = r1 * (x1 - x2) * 2, b = r1 * (y1 - y2) * 2, c = r2 * r2 - r1 * r1 - d * d;
ld p = a * a + b * b, q = -a * c * 2, r = c * c - b * b;
ld cosa, sina, cosb, sinb;
if (sign(d - (r1 + r2)) == 0 || sign(d - abs(r1 - r2)) == 0) {
cosa = -q / p / 2;
sina = sqrt(1 - cosa * cosa);
Point<ld> p0 = {x1 + r1 * cosa, y1 + r1 * sina};
if (sign(dis(p0, p2) - r2)) {
p0.y = y1 - r1 * sina;
}
return {2, p0, p0};
} else {
ld delta = sqrt(q * q - p * r * 4);
cosa = (delta - q) / p / 2;
cosb = (-delta - q) / p / 2;
sina = sqrt(1 - cosa * cosa);
sinb = sqrt(1 - cosb * cosb);
Pd ans1 = {x1 + r1 * cosa, y1 + r1 * sina};
Pd ans2 = {x1 + r1 * cosb, y1 + r1 * sinb};
if (sign(dis(ans1, p1) - r2)) ans1.y = y1 - r1 * sina;
if (sign(dis(ans2, p2) - r2)) ans2.y = y1 - r1 * sinb;
if (ans1 == ans2) ans1.y = y1 - r1 * sina;
return {3, ans1, ans2};
}
}
5.5.6 两圆相交面积
上述所言四种相交情况均可计算,之所以不使用三角形面积计算公式是因为在计算过程中会出现“负数”面积(扇形面积与三角形面积的符号关系会随圆的位置关系发生变化),故公式全部重新推导,这里采用的是扇形面积减去扇形内部的那个三角形的面积。
ld circleIntersectionArea(Pd p1, ld r1, Pd p2, ld r2) {
ld x1 = p1.x, x2 = p2.x, y1 = p1.y, y2 = p2.y, d = dis(p1, p2);
if (sign(abs(r1 - r2) - d) >= 0) {
return PI * min(r1 * r1, r2 * r2);
} else if (sign(r1 + r2 - d) == -1) {
return 0;
}
ld theta1 = angle(r1, dis(p1, p2), r2);
ld area1 = r1 * r1 * (theta1 - sin(theta1 * 2) / 2);
ld theta2 = angle(r2, dis(p1, p2), r1);
ld area2 = r2 * r2 * (theta2 - sin(theta2 * 2) / 2);
return area1 + area2;
}
5.5.7 三点确定一圆
tuple<int, Pd, ld> getCircle(Pd A, Pd B, Pd C) {
if (onLine(A, B, C)) { // 特判三点共线
return {0, {}, 0};
}
Ld l1 = midSegment(Line{A, B});
Ld l2 = midSegment(Line{A, C});
Pd O = lineIntersection(l1, l2);
return {1, O, dis(A, O)};
}
5.5.8 求解点到圆的切线数量与切点
pair<int, vector<Point<ld>>> tangent(Point<ld> p, Point<ld> A, ld r) {
vector<Point<ld>> ans; // 储存切点
Point<ld> u = A - p;
ld d = sqrt(dot(u, u));
if (d < r) {
return {0, {}};
} else if (sign(d - r) == 0) { // 点在圆上
ans.push_back(u);
return {1, ans};
} else {
ld ang = asin(r / d);
ans.push_back(getPoint(A, r, -ang));
ans.push_back(getPoint(A, r, ang));
return {2, ans};
}
}
5.5.9 求解两圆的内公、外公切线数量与切点
同时返回公切线数量以及每个圆的切点。
tuple<int, vector<Point<ld>>, vector<Point<ld>>> tangent(Point<ld> A, ld Ar, Point<ld> B, ld Br) {
vector<Point<ld>> a, b; // 储存切点
if (Ar < Br) {
swap(Ar, Br);
swap(A, B);
swap(a, b);
}
int d = disEx(A, B), dif = Ar - Br, sum = Ar + Br;
if (d < dif * dif) { // 内含,无
return {0, {}, {}};
}
ld base = atan2(B.y - A.y, B.x - A.x);
if (d == 0 && Ar == Br) { // 完全重合,无数条外公切线
return {-1, {}, {}};
}
if (d == dif * dif) { // 内切,1条外公切线
a.push_back(getPoint(A, Ar, base));
b.push_back(getPoint(B, Br, base));
return {1, a, b};
}
ld ang = acos(dif / sqrt(d));
a.push_back(getPoint(A, Ar, base + ang)); // 保底2条外公切线
a.push_back(getPoint(A, Ar, base - ang));
b.push_back(getPoint(B, Br, base + ang));
b.push_back(getPoint(B, Br, base - ang));
if (d == sum * sum) { // 外切,多1条内公切线
a.push_back(getPoint(A, Ar, base));
b.push_back(getPoint(B, Br, base + PI));
} else if (d > sum * sum) { // 相离,多2条内公切线
ang = acos(sum / sqrt(d));
a.push_back(getPoint(A, Ar, base + ang));
a.push_back(getPoint(A, Ar, base - ang));
b.push_back(getPoint(B, Br, base + ang + PI));
b.push_back(getPoint(B, Br, base - ang + PI));
}
return {a.size(), a, b};
}
5.6 平面三角形相关(浮点数处理)
5.6.1 三角形面积
ld area(Point<ld> a, Point<ld> b, Point<ld> c) {
return abs(cross(b, c, a)) / 2;
}
5.6.2 三角形外心
三角形外接圆的圆心,即三角形三边垂直平分线的交点。
template<class T> Pt center1(Pt p1, Pt p2, Pt p3) { // 外心
return lineIntersection(midSegment({p1, p2}), midSegment({p2, p3}));
}
5.6.3 三角形内心
三角形内切圆的圆心,也是三角形三个内角的角平分线的交点。其到三角形三边的距离相等。
Pd center2(Pd p1, Pd p2, Pd p3) { // 内心
#define atan2(p) atan2(p.y, p.x) // 注意先后顺序
Line<ld> U = {p1, {}}, V = {p2, {}};
ld m, n, alpha;
m = atan2((p2 - p1));
n = atan2((p3 - p1));
alpha = (m + n) / 2;
U.b = {p1.x + cos(alpha), p1.y + sin(alpha)};
m = atan2((p1 - p2));
n = atan2((p3 - p2));
alpha = (m + n) / 2;
V.b = {p2.x + cos(alpha), p2.y + sin(alpha)};
return lineIntersection(U, V);
}
5.6.4 三角形垂心
三角形的三条高线所在直线的交点。锐角三角形的垂心在三角形内;直角三角形的垂心在直角顶点上;钝角三角形的垂心在三角形外。
Pd center3(Pd p1, Pd p2, Pd p3) { // 垂心
Ld U = {p1, p1 + rotate(p2, p3)}; // 垂线
Ld V = {p2, p2 + rotate(p1, p3)};
return lineIntersection(U, V);
}
5.7 平面直线方程转换
5.7.1 浮点数计算直线的斜率
一般很少使用到这个函数,因为斜率的取值不可控(例如接近平行于 \(x,y\) 轴时)。需要注意,当直线平行于 \(y\) 轴时斜率为 inf 。
template <class T> ld slope(Pt p1, Pt p2) { // 斜率,注意 inf 的情况
return (p1.y - p2.y) / (p1.x - p2.x);
}
template <class T> ld slope(Lt l) {
return slope(l.a, l.b);
}
5.7.2 分数精确计算直线的斜率
调用分数四则运算精确计算斜率,返回最简分数,只适用于整数计算。
template<class T> Frac<T> slopeEx(Pt p1, Pt p2) {
Frac<T> U = p1.y - p2.y;
Frac<T> V = p1.x - p2.x;
return U / V; // 调用分数精确计算
}
5.7.3 两点式转一般式
返回由三个整数构成的方程,在输入较大时可能找不到较小的满足题意的一组整数解。可以处理平行于 \(x,y\) 轴、两点共点的情况。
template<class T> tuple<T, T, T> getfun(Lt p) {
T A = p.a.y - p.b.y, B = p.b.x - p.a.x, C = p.a.x * A + p.a.y * B;
if (A < 0) { // 符号调整
A = -A, B = -B, C = -C;
} else if (A == 0) {
if (B < 0) {
B = -B, C = -C;
} else if (B == 0 && C < 0) {
C = -C;
}
}
if (A == 0) { // 数值计算
if (B == 0) {
C = 0; // 共点特判
} else {
T g = fgcd(abs(B), abs(C));
B /= g, C /= g;
}
} else if (B == 0) {
T g = fgcd(abs(A), abs(C));
A /= g, C /= g;
} else {
T g = fgcd(fgcd(abs(A), abs(B)), abs(C));
A /= g, B /= g, C /= g;
}
return tuple{A, B, C}; // Ax + By = C
}
5.7.4 一般式转两点式
由于整数点可能很大或者不存在,故直接采用浮点数;如果与 \(x,y\) 轴有交点则取交点。可以处理平行于 \(x,y\) 轴的情况。
Line<ld> getfun(int A, int B, int C) { // Ax + By = C
ld x1 = 0, y1 = 0, x2 = 0, y2 = 0;
if (A && B) { // 正常
if (C) {
x1 = 0, y1 = 1. * C / B;
y2 = 0, x2 = 1. * C / A;
} else { // 过原点
x1 = 1, y1 = 1. * -A / B;
x2 = 0, y2 = 0;
}
} else if (A && !B) { // 垂直
if (C) {
y1 = 0, x1 = 1. * C / A;
y2 = 1, x2 = x1;
} else {
x1 = 0, y1 = 1;
x2 = 0, y2 = 0;
}
} else if (!A && B) { // 水平
if (C) {
x1 = 0, y1 = 1. * C / B;
x2 = 1, y2 = y1;
} else {
x1 = 1, y1 = 0;
x2 = 0, y2 = 0;
}
} else { // 不合法,请特判
assert(false);
}
return {{x1, y1}, {x2, y2}};
}
5.7.5 抛物线与 x 轴是否相交及交点
\(0\) 代表没有交点;\(1\) 代表相切;\(2\) 代表有两个交点。
tuple<int, ld, ld> getAns(ld a, ld b, ld c) {
ld delta = b * b - a * c * 4;
if (delta < 0.) {
return {0, 0, 0};
}
delta = sqrt(delta);
ld ans1 = -(delta + b) / 2 / a;
ld ans2 = (delta - b) / 2 / a;
if (ans1 > ans2) {
swap(ans1, ans2);
}
if (sign(delta) == 0) {
return {1, ans2, 0};
}
return {2, ans1, ans2};
}
5.8 平面多边形
5.8.1 两向量构成的平面四边形有向面积
template<class T> T areaEx(Point<T> p1, Point<T> p2, Point<T> p3) {
return cross(b, c, a);
}
5.8.2 判断四个点能否组成矩形/正方形
可以处理浮点数、共点的情况。返回分为三种情况:\(2\) 代表构成正方形;\(1\) 代表构成矩形;\(0\) 代表其他情况。
template<class T> int isSquare(vector<Pt> x) {
sort(x.begin(), x.end());
if (equal(dis(x[0], x[1]), dis(x[2], x[3])) && sign(dis(x[0], x[1])) &&
equal(dis(x[0], x[2]), dis(x[1], x[3])) && sign(dis(x[0], x[2])) &&
lineParallel(Lt{x[0], x[1]}, Lt{x[2], x[3]}) &&
lineParallel(Lt{x[0], x[2]}, Lt{x[1], x[3]}) &&
lineVertical(Lt{x[0], x[1]}, Lt{x[0], x[2]})) {
return equal(dis(x[0], x[1]), dis(x[0], x[2])) ? 2 : 1;
}
return 0;
}
5.8.3 点是否在任意多边形内
射线法判定,\(t\) 为穿越次数,当其为奇数时即代表点在多边形内部;返回 \(2\) 代表点在多边形边界上。
template<class T> int pointInPolygon(Point<T> a, vector<Point<T>> p) {
int n = p.size();
for (int i = 0; i < n; i++) {
if (pointOnSegment(a, Line{p[i], p[(i + 1) % n]})) {
return 2;
}
}
int t = 0;
for (int i = 0; i < n; i++) {
auto u = p[i], v = p[(i + 1) % n];
if (u.x < a.x && v.x >= a.x && pointOnLineLeft(a, Line{v, u})) {
t ^= 1;
}
if (u.x >= a.x && v.x < a.x && pointOnLineLeft(a, Line{u, v})) {
t ^= 1;
}
}
return t == 1;
}
5.8.4 线段是否在任意多边形内部
template<class T>
bool segmentInPolygon(Line<T> l, vector<Point<T>> p) {
// 线段与多边形边界不相交且两端点都在多边形内部
#define L(x, y) pointOnLineLeft(x, y)
int n = p.size();
if (!pointInPolygon(l.a, p)) return false;
if (!pointInPolygon(l.b, p)) return false;
for (int i = 0; i < n; i++) {
auto u = p[i];
auto v = p[(i + 1) % n];
auto w = p[(i + 2) % n];
auto [t, p1, p2] = segmentIntersection(l, Line(u, v));
if (t == 1) return false;
if (t == 0) continue;
if (t == 2) {
if (pointOnSegment(v, l) && v != l.a && v != l.b) {
if (cross(v - u, w - v) > 0) {
return false;
}
}
} else {
if (p1 != u && p1 != v) {
if (L(l.a, Line(v, u)) || L(l.b, Line(v, u))) {
return false;
}
} else if (p1 == v) {
if (l.a == v) {
if (L(u, l)) {
if (L(w, l) && L(w, Line(u, v))) {
return false;
}
} else {
if (L(w, l) || L(w, Line(u, v))) {
return false;
}
}
} else if (l.b == v) {
if (L(u, Line(l.b, l.a))) {
if (L(w, Line(l.b, l.a)) && L(w, Line(u, v))) {
return false;
}
} else {
if (L(w, Line(l.b, l.a)) || L(w, Line(u, v))) {
return false;
}
}
} else {
if (L(u, l)) {
if (L(w, Line(l.b, l.a)) || L(w, Line(u, v))) {
return false;
}
} else {
if (L(w, l) || L(w, Line(u, v))) {
return false;
}
}
}
}
}
}
return true;
}
5.8.5 任意多边形的面积
template<class T> ld area(vector<Point<T>> P) {
int n = P.size();
ld ans = 0;
for (int i = 0; i < n; i++) {
ans += cross(P[i], P[(i + 1) % n]);
}
return ans / 2.0;
}
5.8.6 皮克定理
绘制在方格纸上的多边形面积公式可以表示为 \(S=n+\dfrac{s}{2}-1\) ,其中 \(n\) 表示多边形内部的点数、\(s\) 表示多边形边界上的点数。一条线段上的点数为 \(\gcd(|x_1-x_2|,|y_1-y_2|)+1\)。
5.8.7 任意多边形上/内的网格点个数(仅能处理整数)
皮克定理用。
int onPolygonGrid(vector<Point<int>> p) { // 多边形上
int n = p.size(), ans = 0;
for (int i = 0; i < n; i++) {
auto a = p[i], b = p[(i + 1) % n];
ans += gcd(abs(a.x - b.x), abs(a.y - b.y));
}
return ans;
}
int inPolygonGrid(vector<Point<int>> p) { // 多边形内
int n = p.size(), ans = 0;
for (int i = 0; i < n; i++) {
auto a = p[i], b = p[(i + 1) % n], c = p[(i + 2) % n];
ans += b.y * (a.x - c.x);
}
ans = abs(ans);
return (ans - onPolygonGrid(p)) / 2 + 1;
}
5.9 二维凸包
5.9.1 获取二维静态凸包(Andrew算法)
flag 用于判定凸包边上的点、重复的顶点是否要加入到凸包中,为 \(0\) 时代表加入凸包(不严格);为 \(1\) 时不加入凸包(严格)。时间复杂度为 \(\mathcal O(N\log N)\) 。
template<class T> vector<Point<T>> staticConvexHull(vector<Point<T>> A, int flag = 1) {
int n = A.size();
if (n <= 2) { // 特判
return A;
}
vector<Point<T>> ans(n * 2);
sort(A.begin(), A.end());
int now = -1;
for (int i = 0; i < n; i++) { // 维护下凸包
while (now > 0 && cross(A[i], ans[now], ans[now - 1]) <= 0) {
now--;
}
ans[++now] = A[i];
}
int pre = now;
for (int i = n - 2; i >= 0; i--) { // 维护上凸包
while (now > pre && cross(A[i], ans[now], ans[now - 1]) <= 0) {
now--;
}
ans[++now] = A[i];
}
ans.resize(now);
return ans;
}
5.9.2 二维动态凸包
固定为 int 型,需要重新书写 Line 函数,cmp 用于判定边界情况。可以处理如下两个要求:
- 动态插入点 \((x,y)\) 到当前凸包中;
- 判断点 \((x,y)\) 是否在凸包上或是在内部(包括边界)。
template<class T> bool turnRight(Pt a, Pt b) {
return cross(a, b) < 0 || (cross(a, b) == 0 && dot(a, b) < 0);
}
struct Line {
static int cmp;
mutable Point<int> a, b;
friend bool operator<(Line x, Line y) {
return cmp ? x.a < y.a : turnRight(x.b, y.b);
}
friend auto &operator<<(ostream &os, Line l) {
return os << "<" << l.a << ", " << l.b << ">";
}
};
int Line::cmp = 1;
struct UpperConvexHull : set<Line> {
bool contains(const Point<int> &p) const {
auto it = lower_bound({p, 0});
if (it != end() && it->a == p) return true;
if (it != begin() && it != end() && cross(prev(it)->b, p - prev(it)->a) <= 0) {
return true;
}
return false;
}
void add(const Point<int> &p) {
if (contains(p)) return;
auto it = lower_bound({p, 0});
for (; it != end(); it = erase(it)) {
if (turnRight(it->a - p, it->b)) {
break;
}
}
for (; it != begin() && prev(it) != begin(); erase(prev(it))) {
if (turnRight(prev(prev(it))->b, p - prev(prev(it))->a)) {
break;
}
}
if (it != begin()) {
prev(it)->b = p - prev(it)->a;
}
if (it == end()) {
insert({p, {0, -1}});
} else {
insert({p, it->a - p});
}
}
};
struct ConvexHull {
UpperConvexHull up, low;
bool empty() const {
return up.empty();
}
bool contains(const Point<int> &p) const {
Line::cmp = 1;
return up.contains(p) && low.contains(-p);
}
void add(const Point<int> &p) {
Line::cmp = 1;
up.add(p);
low.add(-p);
}
bool isIntersect(int A, int B, int C) const {
Line::cmp = 0;
if (empty()) return false;
Point<int> k = {-B, A};
if (k.x < 0) k = -k;
if (k.x == 0 && k.y < 0) k.y = -k.y;
Point<int> P = up.upper_bound({{0, 0}, k})->a;
Point<int> Q = -low.upper_bound({{0, 0}, k})->a;
return sign(A * P.x + B * P.y - C) * sign(A * Q.x + B * Q.y - C) > 0;
}
friend ostream &operator<<(ostream &out, const ConvexHull &ch) {
for (const auto &line : ch.up) out << "(" << line.a.x << "," << line.a.y << ")";
cout << "/";
for (const auto &line : ch.low) out << "(" << -line.a.x << "," << -line.a.y << ")";
return out;
}
};
5.9.3 点与凸包的位置关系
\(0\) 代表点在凸包外面;\(1\) 代表在凸壳上;\(2\) 代表在凸包内部。
template<class T> int contains(Point<T> p, vector<Point<T>> A) {
int n = A.size();
bool in = false;
for (int i = 0; i < n; i++) {
Point<T> a = A[i] - p, b = A[(i + 1) % n] - p;
if (a.y > b.y) {
swap(a, b);
}
if (a.y <= 0 && 0 < b.y && cross(a, b) < 0) {
in = !in;
}
if (cross(a, b) == 0 && dot(a, b) <= 0) {
return 1;
}
}
return in ? 2 : 0;
}
5.9.4 闵可夫斯基和
计算两个凸包合成的大凸包。
template<class T> vector<Point<T>> mincowski(vector<Point<T>> P1, vector<Point<T>> P2) {
int n = P1.size(), m = P2.size();
vector<Point<T>> V1(n), V2(m);
for (int i = 0; i < n; i++) {
V1[i] = P1[(i + 1) % n] - P1[i];
}
for (int i = 0; i < m; i++) {
V2[i] = P2[(i + 1) % m] - P2[i];
}
vector<Point<T>> ans = {P1.front() + P2.front()};
int t = 0, i = 0, j = 0;
while (i < n && j < m) {
Point<T> val = sign(cross(V1[i], V2[j])) > 0 ? V1[i++] : V2[j++];
ans.push_back(ans.back() + val);
}
while (i < n) ans.push_back(ans.back() + V1[i++]);
while (j < m) ans.push_back(ans.back() + V2[j++]);
return ans;
}
5.9.5 半平面交
计算多条直线左边平面部分的交集。
template<class T> vector<Point<T>> halfcut(vector<Line<T>> lines) {
sort(lines.begin(), lines.end(), [&](auto l1, auto l2) {
auto d1 = l1.b - l1.a;
auto d2 = l2.b - l2.a;
if (sign(d1) != sign(d2)) {
return sign(d1) == 1;
}
return cross(d1, d2) > 0;
});
deque<Line<T>> ls;
deque<Point<T>> ps;
for (auto l : lines) {
if (ls.empty()) {
ls.push_back(l);
continue;
}
while (!ps.empty() && !pointOnLineLeft(ps.back(), l)) {
ps.pop_back();
ls.pop_back();
}
while (!ps.empty() && !pointOnLineLeft(ps[0], l)) {
ps.pop_front();
ls.pop_front();
}
if (cross(l.b - l.a, ls.back().b - ls.back().a) == 0) {
if (dot(l.b - l.a, ls.back().b - ls.back().a) > 0) {
if (!pointOnLineLeft(ls.back().a, l)) {
assert(ls.size() == 1);
ls[0] = l;
}
continue;
}
return {};
}
ps.push_back(lineIntersection(ls.back(), l));
ls.push_back(l);
}
while (!ps.empty() && !pointOnLineLeft(ps.back(), ls[0])) {
ps.pop_back();
ls.pop_back();
}
if (ls.size() <= 2) {
return {};
}
ps.push_back(lineIntersection(ls[0], ls.back()));
return vector(ps.begin(), ps.end());
}
5.10 三维几何必要初始化
5.10.1 点线面封装
struct Point3 {
ld x, y, z;
Point3(ld x_ = 0, ld y_ = 0, ld z_ = 0) : x(x_), y(y_), z(z_) {}
Point3 &operator+=(Point3 p) & {
return x += p.x, y += p.y, z += p.z, *this;
}
Point3 &operator-=(Point3 p) & {
return x -= p.x, y -= p.y, z -= p.z, *this;
}
Point3 &operator*=(Point3 p) & {
return x *= p.x, y *= p.y, z *= p.z, *this;
}
Point3 &operator*=(ld t) & {
return x *= t, y *= t, z *= t, *this;
}
Point3 &operator/=(ld t) & {
return x /= t, y /= t, z /= t, *this;
}
friend Point3 operator+(Point3 a, Point3 b) { return a += b; }
friend Point3 operator-(Point3 a, Point3 b) { return a -= b; }
friend Point3 operator*(Point3 a, Point3 b) { return a *= b; }
friend Point3 operator*(Point3 a, ld b) { return a *= b; }
friend Point3 operator*(ld a, Point3 b) { return b *= a; }
friend Point3 operator/(Point3 a, ld b) { return a /= b; }
friend auto &operator>>(istream &is, Point3 &p) {
return is >> p.x >> p.y >> p.z;
}
friend auto &operator<<(ostream &os, Point3 p) {
return os << "(" << p.x << ", " << p.y << ", " << p.z << ")";
}
};
struct Line3 {
Point3 a, b;
};
struct Plane {
Point3 u, v, w;
};
5.10.2 其他函数
ld len(P3 p) { // 原点到当前点的距离计算
return sqrt(p.x * p.x + p.y * p.y + p.z * p.z);
}
P3 crossEx(P3 a, P3 b) { // 叉乘
P3 ans;
ans.x = a.y * b.z - a.z * b.y;
ans.y = a.z * b.x - a.x * b.z;
ans.z = a.x * b.y - a.y * b.x;
return ans;
}
ld cross(P3 a, P3 b) {
return len(crossEx(a, b));
}
ld dot(P3 a, P3 b) { // 点乘
return a.x * b.x + a.y * b.y + a.z * b.z;
}
P3 getVec(Plane s) { // 获取平面法向量
return crossEx(s.u - s.v, s.v - s.w);
}
ld dis(P3 a, P3 b) { // 三维欧几里得距离公式
ld val = (a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y) + (a.z - b.z) * (a.z - b.z);
return sqrt(val);
}
P3 standardize(P3 vec) { // 将三维向量转换为单位向量
return vec / len(vec);
}
5.11 三维点线面相关
5.11.1 空间三点是否共线
其中第二个函数是专门用来判断给定的三个点能否构成平面的,因为不共线的三点才能构成平面。
bool onLine(P3 p1, P3 p2, P3 p3) { // 三点是否共线
return sign(cross(p1 - p2, p3 - p2)) == 0;
}
bool onLine(Plane s) {
return onLine(s.u, s.v, s.w);
}
5.11.2 四点是否共面
bool onPlane(P3 p1, P3 p2, P3 p3, P3 p4) { // 四点是否共面
ld val = dot(getVec({p1, p2, p3}), p4 - p1);
return sign(val) == 0;
}
5.11.3 空间点是否在线段上
bool pointOnSegment(P3 p, L3 l) {
return sign(cross(p - l.a, p - l.b)) == 0 && min(l.a.x, l.b.x) <= p.x &&
p.x <= max(l.a.x, l.b.x) && min(l.a.y, l.b.y) <= p.y && p.y <= max(l.a.y, l.b.y) &&
min(l.a.z, l.b.z) <= p.z && p.z <= max(l.a.z, l.b.z);
}
bool pointOnSegmentEx(P3 p, L3 l) { // pointOnSegment去除端点版
return sign(cross(p - l.a, p - l.b)) == 0 && min(l.a.x, l.b.x) < p.x &&
p.x < max(l.a.x, l.b.x) && min(l.a.y, l.b.y) < p.y && p.y < max(l.a.y, l.b.y) &&
min(l.a.z, l.b.z) < p.z && p.z < max(l.a.z, l.b.z);
}
5.11.4 空间两点是否在线段同侧
当给定的两点与线段不共面、点在线段上时返回 \(false\) 。
bool pointOnSegmentSide(P3 p1, P3 p2, L3 l) {
if (!onPlane(p1, p2, l.a, l.b)) { // 特判不共面
return 0;
}
ld val = dot(crossEx(l.a - l.b, p1 - l.b), crossEx(l.a - l.b, p2 - l.b));
return sign(val) == 1;
}
5.11.5 两点是否在平面同侧
点在平面上时返回 \(false\) 。
bool pointOnPlaneSide(P3 p1, P3 p2, Plane s) {
ld val = dot(getVec(s), p1 - s.u) * dot(getVec(s), p2 - s.u);
return sign(val) == 1;
}
5.11.6 空间两直线是否平行/垂直
bool lineParallel(L3 l1, L3 l2) {
return sign(cross(l1.a - l1.b, l2.a - l2.b)) == 0;
}
bool lineVertical(L3 l1, L3 l2) {
return sign(dot(l1.a - l1.b, l2.a - l2.b)) == 0;
}
5.11.7 两平面是否平行/垂直
bool planeParallel(Plane s1, Plane s2) {
ld val = cross(getVec(s1), getVec(s2));
return sign(val) == 0;
}
bool planeVertical(Plane s1, Plane s2) {
ld val = dot(getVec(s1), getVec(s2));
return sign(val) == 0;
}
5.11.8 空间两直线是否是同一条
bool same(L3 l1, L3 l2) {
return lineParallel(l1, l2) && lineParallel({l1.a, l2.b}, {l1.b, l2.a});
}
5.11.9 两平面是否是同一个
bool same(Plane s1, Plane s2) {
return onPlane(s1.u, s2.u, s2.v, s2.w) && onPlane(s1.v, s2.u, s2.v, s2.w) &&
onPlane(s1.w, s2.u, s2.v, s2.w);
}
5.11.10 直线是否与平面平行
bool linePlaneParallel(L3 l, Plane s) {
ld val = dot(l.a - l.b, getVec(s));
return sign(val) == 0;
}
5.11.11 空间两线段是否相交
bool segmentIntersection(L3 l1, L3 l2) { // 重叠、相交于端点均视为相交
if (!onPlane(l1.a, l1.b, l2.a, l2.b)) { // 特判不共面
return 0;
}
if (!onLine(l1.a, l1.b, l2.a) || !onLine(l1.a, l1.b, l2.b)) {
return !pointOnSegmentSide(l1.a, l1.b, l2) && !pointOnSegmentSide(l2.a, l2.b, l1);
}
return pointOnSegment(l1.a, l2) || pointOnSegment(l1.b, l2) || pointOnSegment(l2.a, l1) ||
pointOnSegment(l2.b, l2);
}
bool segmentIntersection1(L3 l1, L3 l2) { // 重叠、相交于端点不视为相交
return onPlane(l1.a, l1.b, l2.a, l2.b) && !pointOnSegmentSide(l1.a, l1.b, l2) &&
!pointOnSegmentSide(l2.a, l2.b, l1);
}
5.11.12 空间两直线是否相交及交点
当两直线不共面、两直线平行时返回 \(false\) 。
pair<bool, P3> lineIntersection(L3 l1, L3 l2) {
if (!onPlane(l1.a, l1.b, l2.a, l2.b) || lineParallel(l1, l2)) {
return {0, {}};
}
auto [s1, e1] = l1;
auto [s2, e2] = l2;
ld val = 0;
if (!onPlane(l1.a, l1.b, {0, 0, 0}, {0, 0, 1})) {
val = ((s1.x - s2.x) * (s2.y - e2.y) - (s1.y - s2.y) * (s2.x - e2.x)) /
((s1.x - e1.x) * (s2.y - e2.y) - (s1.y - e1.y) * (s2.x - e2.x));
} else if (!onPlane(l1.a, l1.b, {0, 0, 0}, {0, 1, 0})) {
val = ((s1.x - s2.x) * (s2.z - e2.z) - (s1.z - s2.z) * (s2.x - e2.x)) /
((s1.x - e1.x) * (s2.z - e2.z) - (s1.z - e1.z) * (s2.x - e2.x));
} else {
val = ((s1.y - s2.y) * (s2.z - e2.z) - (s1.z - s2.z) * (s2.y - e2.y)) /
((s1.y - e1.y) * (s2.z - e2.z) - (s1.z - e1.z) * (s2.y - e2.y));
}
return {1, s1 + (e1 - s1) * val};
}
5.11.13 直线与平面是否相交及交点
当直线与平面平行、给定的点构不成平面时返回 \(false\) 。
pair<bool, P3> linePlaneCross(L3 l, Plane s) {
if (linePlaneParallel(l, s)) {
return {0, {}};
}
P3 vec = getVec(s);
P3 U = vec * (s.u - l.a), V = vec * (l.b - l.a);
ld val = (U.x + U.y + U.z) / (V.x + V.y + V.z);
return {1, l.a + (l.b - l.a) * val};
}
5.11.14 两平面是否相交及交线
当两平面平行、两平面为同一个时返回 \(false\) 。
pair<bool, L3> planeIntersection(Plane s1, Plane s2) {
if (planeParallel(s1, s2) || same(s1, s2)) {
return {0, {}};
}
P3 U = linePlaneParallel({s2.u, s2.v}, s1) ? linePlaneCross({s2.v, s2.w}, s1).second
: linePlaneCross({s2.u, s2.v}, s1).second;
P3 V = linePlaneParallel({s2.w, s2.u}, s1) ? linePlaneCross({s2.v, s2.w}, s1).second
: linePlaneCross({s2.w, s2.u}, s1).second;
return {1, {U, V}};
}
5.11.15 点到直线的最近点与最近距离
pair<ld, P3> pointToLine(P3 p, L3 l) {
ld val = cross(p - l.a, l.a - l.b) / dis(l.a, l.b); // 面积除以底边长
ld val1 = dot(p - l.a, l.a - l.b) / dis(l.a, l.b);
return {val, l.a + val1 * standardize(l.a - l.b)};
}
5.11.16 点到平面的最近点与最近距离
pair<ld, P3> pointToPlane(P3 p, Plane s) {
P3 vec = getVec(s);
ld val = dot(vec, p - s.u);
val = abs(val) / len(vec); // 面积除以底边长
return {val, p - val * standardize(vec)};
}
5.11.17 空间两直线的最近距离与最近点对
tuple<ld, P3, P3> lineToLine(L3 l1, L3 l2) {
P3 vec = crossEx(l1.a - l1.b, l2.a - l2.b); // 计算同时垂直于两直线的向量
ld val = abs(dot(l1.a - l2.a, vec)) / len(vec);
P3 U = l1.b - l1.a, V = l2.b - l2.a;
vec = crossEx(U, V);
ld p = dot(vec, vec);
ld t1 = dot(crossEx(l2.a - l1.a, V), vec) / p;
ld t2 = dot(crossEx(l2.a - l1.a, U), vec) / p;
return {val, l1.a + (l1.b - l1.a) * t1, l2.a + (l2.b - l2.a) * t2};
}
5.12 三维角度与弧度
5.12.1 空间两直线夹角的 cos 值
任意位置的空间两直线。
ld lineCos(L3 l1, L3 l2) {
return dot(l1.a - l1.b, l2.a - l2.b) / len(l1.a - l1.b) / len(l2.a - l2.b);
}
5.12.2 空间两平面夹角的 cos 值
ld planeCos(Plane s1, Plane s2) {
P3 U = getVec(s1), V = getVec(s2);
return dot(U, V) / len(U) / len(V);
}
5.12.3 直线与平面夹角的 sin 值
ld linePlaneSin(L3 l, Plane s) {
P3 vec = getVec(s);
return dot(l.a - l.b, vec) / len(l.a - l.b) / len(vec);
}
5.13 空间多边形
5.13.1 正N棱锥体积公式
棱锥通用体积公式 \(V=\dfrac{1}{3}Sh\) ,当其恰好是棱长为 \(l\) 的正 \(n\) 棱锥时,有公式 \(\displaystyle V=\frac{l^3\cdot n}{12\tan \frac{\pi}{n}}\cdot\sqrt{1-\frac{1}{4\cdot \sin^2\frac{\pi}{n}}}\)。
ld V(ld l, int n) { // 正n棱锥体积公式
return l * l * l * n / (12 * tan(PI / n)) * sqrt(1 - 1 / (4 * sin(PI / n) * sin(PI / n)));
}
5.13.2 四面体体积
ld V(P3 a, P3 b, P3 c, P3 d) {
return abs(dot(d - a, crossEx(b - a, c - a))) / 6;
}
5.13.3 点是否在空间三角形上
点位于边界上时返回 \(false\) 。
bool pointOnTriangle(P3 p, P3 p1, P3 p2, P3 p3) {
return pointOnSegmentSide(p, p1, {p2, p3}) && pointOnSegmentSide(p, p2, {p1, p3}) &&
pointOnSegmentSide(p, p3, {p1, p2});
}
5.13.4 线段是否与空间三角形相交及交点
只有交点在空间三角形内部时才视作相交。
pair<bool, P3> segmentOnTriangle(P3 l, P3 r, P3 p1, P3 p2, P3 p3) {
P3 x = crossEx(p2 - p1, p3 - p1);
if (sign(dot(x, r - l)) == 0) {
return {0, {}};
}
ld t = dot(x, p1 - l) / dot(x, r - l);
if (t < 0 || t - 1 > 0) { // 不在线段上
return {0, {}};
}
bool type = pointOnTriangle(l + (r - l) * t, p1, p2, p3);
if (type) {
return {1, l + (r - l) * t};
} else {
return {0, {}};
}
}
5.13.5 空间三角形是否相交
相交线段在空间三角形内部时才视作相交。
bool triangleIntersection(vector<P3> a, vector<P3> b) {
for (int i = 0; i < 3; i++) {
if (segmentOnTriangle(b[i], b[(i + 1) % 3], a[0], a[1], a[2]).first) {
return 1;
}
if (segmentOnTriangle(a[i], a[(i + 1) % 3], b[0], b[1], b[2]).first) {
return 1;
}
}
return 0;
}
5.14 常用结论
5.14.1 平面几何结论归档
hypot函数可以直接计算直角三角形的斜边长;- 边心距是指正多边形的外接圆圆心到正多边形某一边的距离,边长为 \(s\) 的正 \(n\) 角形的边心距公式为 \(\displaystyle a=\frac{t}{2\cdot\tan \frac{\pi}{n}}\) ,外接圆半径为 \(R\) 的正 \(n\) 角形的边心距公式为 \(a=R\cdot \cos \dfrac{\pi}{n}\) ;
- 三角形外接圆半径为 \(\dfrac{a}{2\sin A}=\dfrac{abc}{4S}\) ,其中 \(S\) 为三角形面积,内切圆半径为 \(\dfrac{2S}{a+b+c}\);
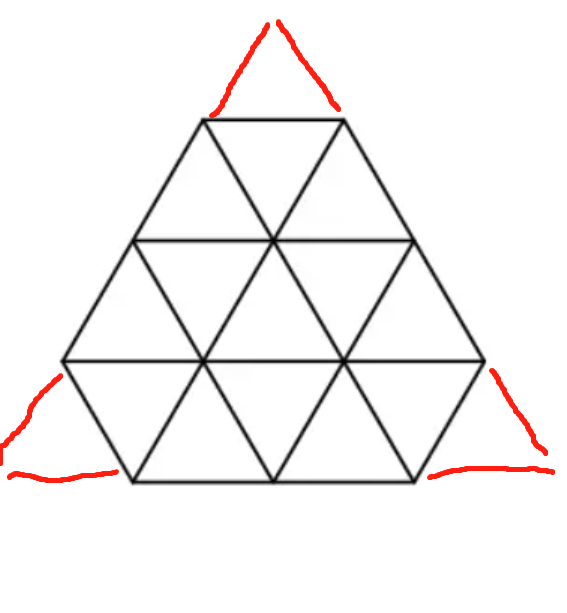
- 由小正三角形拼成的大正三角形,耗费的小三角形数量即为构成一条边的小三角形数量的平方。如下图,总数量即为 \(4^2\) See。
 - 正 \(n\) 边形圆心角为 \(\dfrac{360^{\circ}}{n}\) ,圆周角为 \(\dfrac{180^{\circ}}{n}\) 。定义正 \(n\) 边形上的三个顶点 \(A,B\) 和 \(C\)(可以不相邻),使得 \(\angle ABC=\theta\) ,当 \(n\le 360\) 时,\(\theta\) 可以取 \(1^{\circ}\) 到 \(179^{\circ}\) 间的任何一个整数 See。
- 某一点 \(B\) 到直线 \(AC\) 的距离公式为 \(\dfrac{|\vec{BA}\times \vec{BC}|}{|AC|}\) ,等价于 \(\dfrac{|aX+bY+c|}{\sqrt{a^2+b^2}}\)。
-
- 正 \(n\) 边形圆心角为 \(\dfrac{360^{\circ}}{n}\) ,圆周角为 \(\dfrac{180^{\circ}}{n}\) 。定义正 \(n\) 边形上的三个顶点 \(A,B\) 和 \(C\)(可以不相邻),使得 \(\angle ABC=\theta\) ,当 \(n\le 360\) 时,\(\theta\) 可以取 \(1^{\circ}\) 到 \(179^{\circ}\) 间的任何一个整数 See。
- 某一点 \(B\) 到直线 \(AC\) 的距离公式为 \(\dfrac{|\vec{BA}\times \vec{BC}|}{|AC|}\) ,等价于 \(\dfrac{|aX+bY+c|}{\sqrt{a^2+b^2}}\)。
- atan(y / x) 函数仅用于计算第一、四象限的值,而 atan2(y, x) 则允许计算所有四个象限的正反切,在使用这个函数时,需要尽量保证 \(x\) 和 \(y\) 的类型为整数型,如果使用浮点数,实测会慢十倍。
- 在平面上有奇数个点 \(A_0,A_1,\dots,A_n\) 以及一个点 \(X_0\) ,构造 \(X_1\) 使得 \(X_0,X_1\) 关于 \(A_0\) 对称、构造 \(X_2\) 使得 \(X_1,X_2\) 关于 \(A_1\) 对称、……、构造 \(X_j\) 使得 \(X_{j-1},X_j\) 关于 \(A_{(j-1)\mod n}\) 对称。那么周期为 \(2n\) ,即 \(A_0\) 与 \(A_{2n}\) 共点、\(A_1\) 与 \(A_{2n+1}\) 共点 See 。
- 已知 \(A\ (x_A, y_A)\) 和 \(X\ (x_X,y_X)\) 两点及这两点的坐标,构造 \(Y\) 使得 \(X,Y\) 关于 \(A\) 对称,那么 \(Y\) 的坐标为 \((2\cdot x_A-x_X,2\cdot y_A-y_X)\) 。
- 海伦公式:已知三角形三边长 \(a,b\) 和 \(c\) ,定义 \(p=\dfrac{a+b+c}{2}\) ,则 \(S_{\triangle}=\sqrt{p(p-a)(p-b)(p-c)}\) ,在使用时需要注意越界问题,本质是铅锤定理,一般多使用叉乘计算三角形面积而不使用该公式。
- 棱台体积 \(V=\frac{1}{3}(S_1+S_2+\sqrt{S_1S_2})\cdot h\),其中 \(S_1,S_2\) 为上下底面积。
- 正棱台侧面积 \(\frac{1}{2}(C_1+C_2)\cdot L\),其中 \(C_1,C_2\) 为上下底周长,\(L\) 为斜高(上下底对应的平行边的距离)。
- 球面积 \(4\pi r^2\),体积 \(\frac{4}{3}\pi r^3\)。
- 正三角形面积 \(\dfrac{\sqrt 3 a^2}{4}\),正四面体面积 \(\dfrac{\sqrt 2 a^3}{12}\)。
- 设扇形对应的圆心角弧度为 \(\theta\) ,则面积为 \(S=\frac{\theta}{2}\cdot R^2\) 。
5.14.2 立体几何结论归档
- 已知向量 \(\vec{r}=\{x,y,z\}\) ,则该向量的三个方向余弦为 \(\cos \alpha =\dfrac{x}{|\vec r|}=\dfrac{x}{\sqrt{x^2+y^2+z^2}}; \ \cos \beta = \dfrac{y}{|\vec r|};\ \cos \gamma =\dfrac{z}{|\vec r|}\) 。其中 \(\alpha,\beta,\gamma\in [0,\pi]\) ,\(\cos^2\alpha+\cos^2\beta+\cos^2\gamma=1\) 。
5.15 常用例题
5.15.1 将平面某点旋转任意角度
题意:给定平面上一点 \((a,b)\) ,输出将其逆时针旋转 \(d\) 度之后的坐标。
signed main() {
int a, b, d;
cin >> a >> b >> d;
ld l = hypot(a, b); // 库函数,求直角三角形的斜边
ld alpha = atan2(b, a) + toArc(d);
cout << l * cos(alpha) << " " << l * sin(alpha) << endl;
}
5.15.2 平面最近点对(set解)
借助 set ,在严格 \(\mathcal O(N\log N)\) 复杂度内求解,比常见的分治法稍快。
template<class T> T sqr(T x) {
return x * x;
}
using V = Point<int>;
signed main() {
int n;
cin >> n;
vector<V> in(n);
for (auto &it : in) {
cin >> it;
}
int dis = disEx(in[0], in[1]); // 设定阈值
sort(in.begin(), in.end());
set<V> S;
for (int i = 0, h = 0; i < n; i++) {
V now = {in[i].y, in[i].x};
while (dis && dis <= sqr(in[i].x - in[h].x)) { // 删除超过阈值的点
S.erase({in[h].y, in[h].x});
h++;
}
auto it = S.lower_bound(now);
for (auto k = it; k != S.end() && sqr(k->x - now.x) < dis; k++) {
dis = min(dis, disEx(*k, now));
}
if (it != S.begin()) {
for (auto k = prev(it); sqr(k->x - now.x) < dis; k--) {
dis = min(dis, disEx(*k, now));
if (k == S.begin()) break;
}
}
S.insert(now);
}
cout << sqrt(dis) << endl;
}
5.15.3 平面若干点能构成的最大四边形的面积(简单版,暴力枚举)
题意:平面上存在若干个点,保证没有两点重合、没有三点共线,你需要从中选出四个点,使得它们构成的四边形面积是最大的,注意这里能组成的四边形可以不是凸四边形。
暴力枚举其中一条对角线后枚举剩余两个点,\(\mathcal O(N^3)\) 。
signed main() {
int n;
cin >> n;
vector<Pi> in(n);
for (auto &it : in) {
cin >> it;
}
ld ans = 0;
for (int i = 0; i < n; i++) {
for (int j = i + 1; j < n; j++) { // 枚举对角线
ld l = 0, r = 0;
for (int k = 0; k < n; k++) { // 枚举第三点
if (k == i || k == j) continue;
if (pointOnLineLeft(in[k], {in[i], in[j]})) {
l = max(l, triangleS(in[k], in[j], in[i]));
} else {
r = max(r, triangleS(in[k], in[j], in[i]));
}
}
if (l * r != 0) { // 确保构成的是四边形
ans = max(ans, l + r);
}
}
}
cout << ans << endl;
}
5.15.4 平面若干点能构成的最大四边形的面积(困难版,分类讨论+旋转卡壳)
题意:平面上存在若干个点,可能存在多点重合、共线的情况,你需要从中选出四个点,使得它们构成的四边形面积是最大的,注意这里能组成的四边形可以不是凸四边形、可以是退化的四边形。
当凸包大小 \(\le 2\) 时,说明是退化的四边形,答案直接为 \(0\) ;大小恰好为 \(3\) 时,说明是凹四边形,我们枚举不在凸包上的那一点,将两个三角形面积相减既可得到答案;大小恰好为 \(4\) 时,说明是凸四边形,使用旋转卡壳求解。
using V = Point<int>;
signed main() {
int Task = 1;
for (cin >> Task; Task; Task--) {
int n;
cin >> n;
vector<V> in_(n);
for (auto &it : in_) {
cin >> it;
}
auto in = staticConvexHull(in_, 0);
n = in.size();
int ans = 0;
if (n > 3) {
ans = rotatingCalipers(in);
} else if (n == 3) {
int area = triangleAreaEx(in[0], in[1], in[2]);
for (auto it : in_) {
if (it == in[0] || it == in[1] || it == in[2]) continue;
int Min = min({triangleAreaEx(it, in[0], in[1]), triangleAreaEx(it, in[0], in[2]), triangleAreaEx(it, in[1], in[2])});
ans = max(ans, area - Min);
}
}
cout << ans / 2;
if (ans % 2) {
cout << ".5";
}
cout << endl;
}
}
5.15.5 线段将多边形切割为几个部分
题意:给定平面上一线段与一个任意多边形,求解线段将多边形切割为几个部分;保证线段的端点不在多边形内、多边形边上,多边形顶点不位于线段上,多边形的边不与线段重叠;多边形端点按逆时针顺序给出。下方的几个样例均合法,答案均为 \(3\) 。
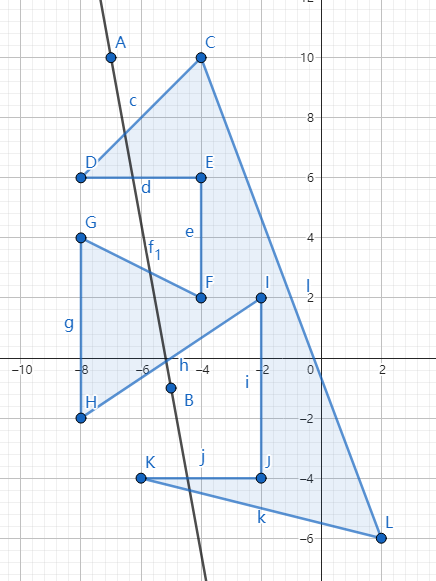
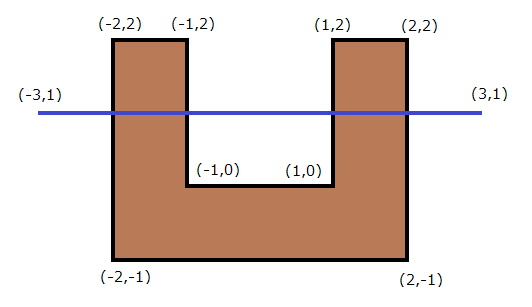
当线段切割多边形时,本质是与多边形的边交于两个点、或者说是与多边形的两条边相交,设交点数目为 \(x\) ,那么答案即为 \(\frac{x}{2}+1\) 。于是,我们只需要计算交点数量即可,先判断某一条边是否与线段相交,再判断边的两个端点是否位于线段两侧。
signed main() {
Pi s, e;
cin >> s >> e; // 读入线段
int n;
cin >> n;
vector<Pi> in(n);
for (auto &it : in) {
cin >> it; // 读入多边形端点
}
int cnt = 0;
for (int i = 0; i < n; i++) {
Pi x = in[i], y = in[(i + 1) % n];
cnt += (pointNotOnLineSide(x, y, {s, e}) && segmentIntersection(Line{x, y}, {s, e}));
}
cout << cnt / 2 + 1 << endl;
}
5.15.6 平面若干点能否构成凸包(暴力枚举)
题意:给定平面上若干个点,判断其是否构成凸包 See 。
可以直接使用凸包模板,但是代码较长;在这里我们使用暴力枚举试点,也能以 \(\mathcal O(N)\) 的复杂度通过。当两个向量的叉乘 \(\le0\) 时说明其夹角大于等于 \(180\degree\) ,使用这一点即可判定。
signed main() {
int n;
cin >> n;
vector<Point<ld>> in(n);
for (auto &it : in) {
cin >> it;
}
for (int i = 0; i < n; i++) {
auto A = in[(i - 1 + n) % n];
auto B = in[i];
auto C = in[(i + 1) % n];
if (cross(A - B, C - B) > 0) {
cout << "No\n";
return 0;
}
}
cout << "Yes\n";
}
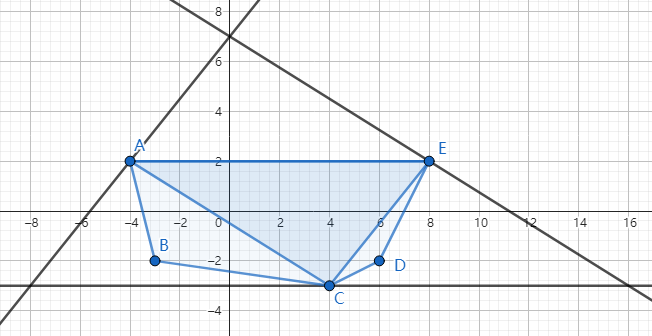
5.15.7 凸包上的点能构成的最大三角形(暴力枚举)
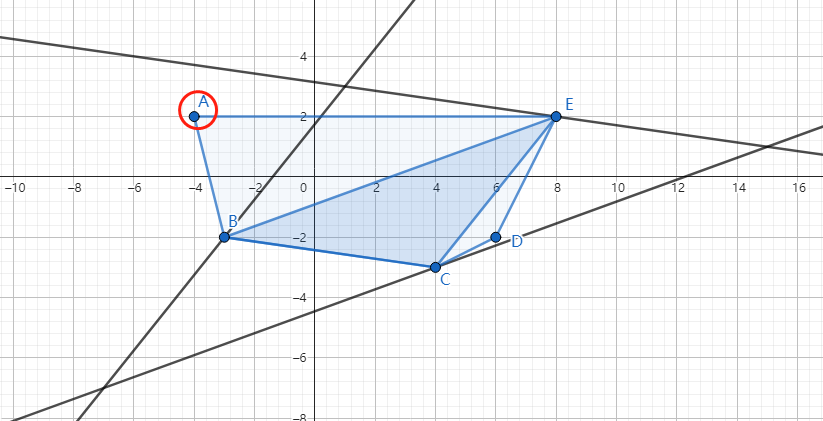
可以直接使用凸包模板,但是代码较长;在这里我们使用暴力枚举试点,也能以 \(\mathcal O(N)\) 的复杂度通过。
另外补充一点性质:所求三角形的反互补三角形一定包含了凸包上的所有点(可以在边界)。通俗的说,构成的三角形是这个反互补三角形的中点三角形。如下图所示,点 \(A\) 不在 \(\triangle BCE\) 的反互补三角形内部,故 \(\triangle BCE\) 不是最大三角形;\(\triangle ACE\) 才是。
signed main() {
int n;
cin >> n;
vector<Point<int>> in(n);
for (auto &it : in) {
cin >> it;
}
#define S(x, y, z) triangleAreaEx(in[x], in[y], in[z])
int i = 0, j = 1, k = 2;
while (true) {
int val = S(i, j, k);
if (S((i + 1) % n, j, k) > val) {
i = (i + 1) % n;
} else if (S((i - 1 + n) % n, j, k) > val) {
i = (i - 1 + n) % n;
} else if (S(i, (j + 1) % n, k) > val) {
j = (j + 1) % n;
} else if (S(i, (j - 1 + n) % n, k) > val) {
j = (j - 1 + n) % n;
} else if (S(i, j, (k + 1) % n) > val) {
k = (k + 1) % n;
} else if (S(i, j, (k - 1 + n) % n) > val) {
k = (k - 1 + n) % n;
} else {
break;
}
}
cout << i + 1 << " " << j + 1 << " " << k + 1 << endl;
}
5.15.8 凸包上的点能构成的最大四角形的面积(旋转卡壳)
由于是凸包上的点,所以保证了四边形一定是凸四边形,时间复杂度 \(\mathcal O(N^2)\) 。
template<class T> T rotatingCalipers(vector<Point<T>> &p) {
#define S(x, y, z) triangleAreaEx(p[x], p[y], p[z])
int n = p.size();
T ans = 0;
auto nxt = [&](int i) -> int {
return i == n - 1 ? 0 : i + 1;
};
for (int i = 0; i < n; i++) {
int p1 = nxt(i), p2 = nxt(nxt(nxt(i)));
for (int j = nxt(nxt(i)); nxt(j) != i; j = nxt(j)) {
while (nxt(p1) != j && S(i, j, nxt(p1)) > S(i, j, p1)) {
p1 = nxt(p1);
}
if (p2 == j) {
p2 = nxt(p2);
}
while (nxt(p2) != i && S(i, j, nxt(p2)) > S(i, j, p2)) {
p2 = nxt(p2);
}
ans = max(ans, S(i, j, p1) + S(i, j, p2));
}
}
return ans;
#undef S
}
5.15.9 判断一个凸包是否完全在另一个凸包内
题意:给定一个凸多边形 \(A\) 和一个凸多边形 \(B\) ,询问 \(B\) 是否被 \(A\) 包含,分别判断严格/不严格包含。例题。
考虑严格包含,使用 \(A\) 点集计算出凸包 \(T_1\) ,使用 \(A,B\) 两个点集计算出不严格凸包 \(T_2\) ,如果包含,那么 \(T_1\) 应该与 \(T_2\) 完全相等;考虑不严格包含,在计算凸包 \(T_2\) 时严格即可。最终以 \(\mathcal O(N)\) 复杂度求解,且代码不算很长。